# Simula un modelo ARIMA(p,d,q) si d=0, es un ARMA(p,q)
rt_RB <- arima.sim(list(order = c(0,0,0)), n = 1000 )
par(mfrow = c(1,2))
plot(rt_RB, type = "l", main = "Serie simulada ruido blanco wt")
acf(rt_RB, lag.max = 40) 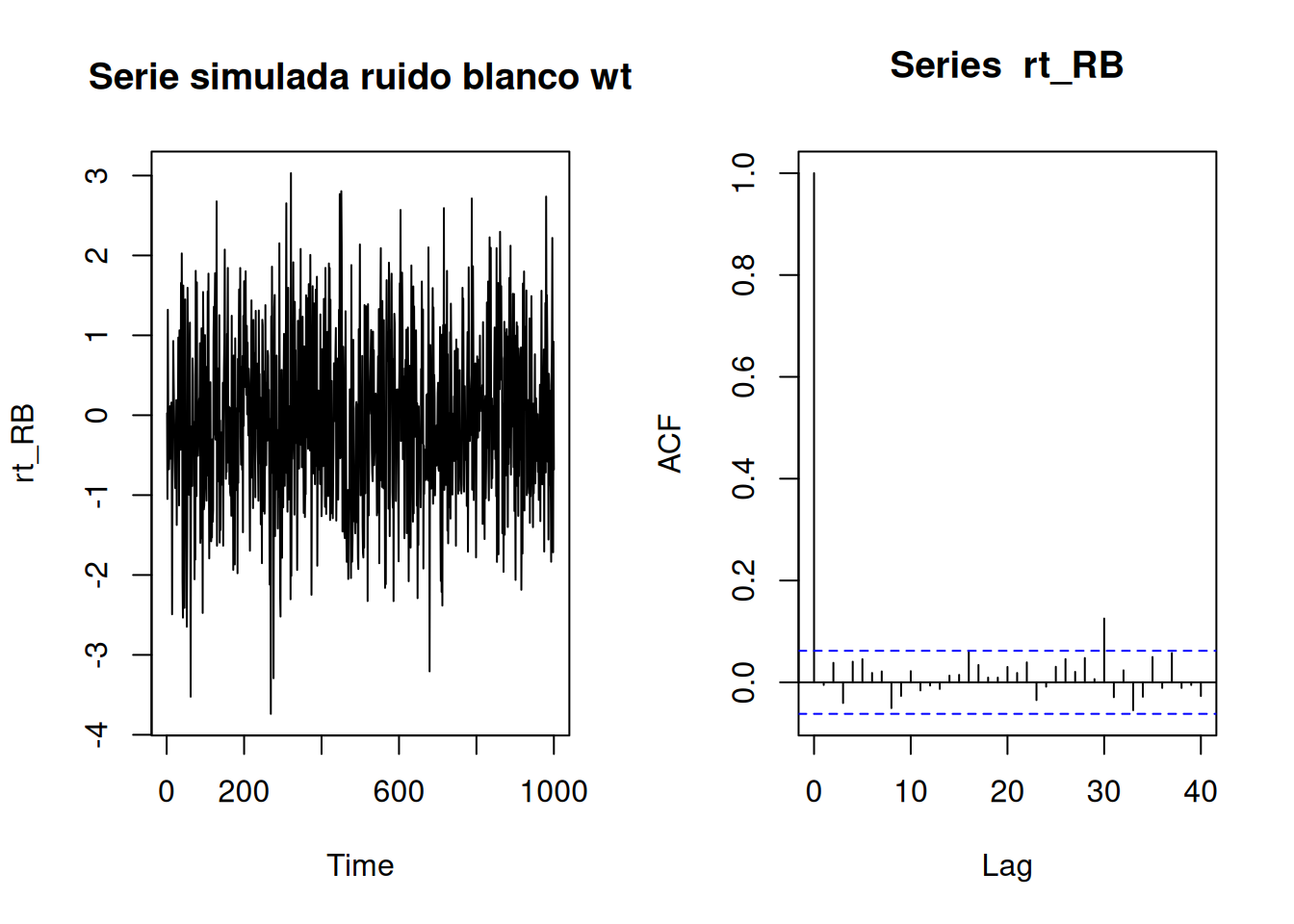
El Autocorrelograma decae rápidamente, por lo cual no hay estacionariedad
# Simula un modelo ARIMA(p,d,q) si d=0, es un ARMA(p,q)
rt_RB <- arima.sim(list(order = c(0,0,0)), n = 1000 )
par(mfrow = c(1,2))
plot(rt_RB, type = "l", main = "Serie simulada ruido blanco wt")
acf(rt_RB, lag.max = 40)
set.seed(154) # para reproducir los resultados
w <- rnorm(200); x <- cumsum(w) # dos comandos en una sola línea
wd <- w + 0.2; xd <- cumsum(wd)
par(mfrow = c(1,1))
plot.ts(xd, ylim = c(-5,55), main = "Random walk", ylab = "")
lines(x, col = 4)
abline(h = 0, col = 4, lty = 2)
abline(a = 0, b = 0.2, lty = 2)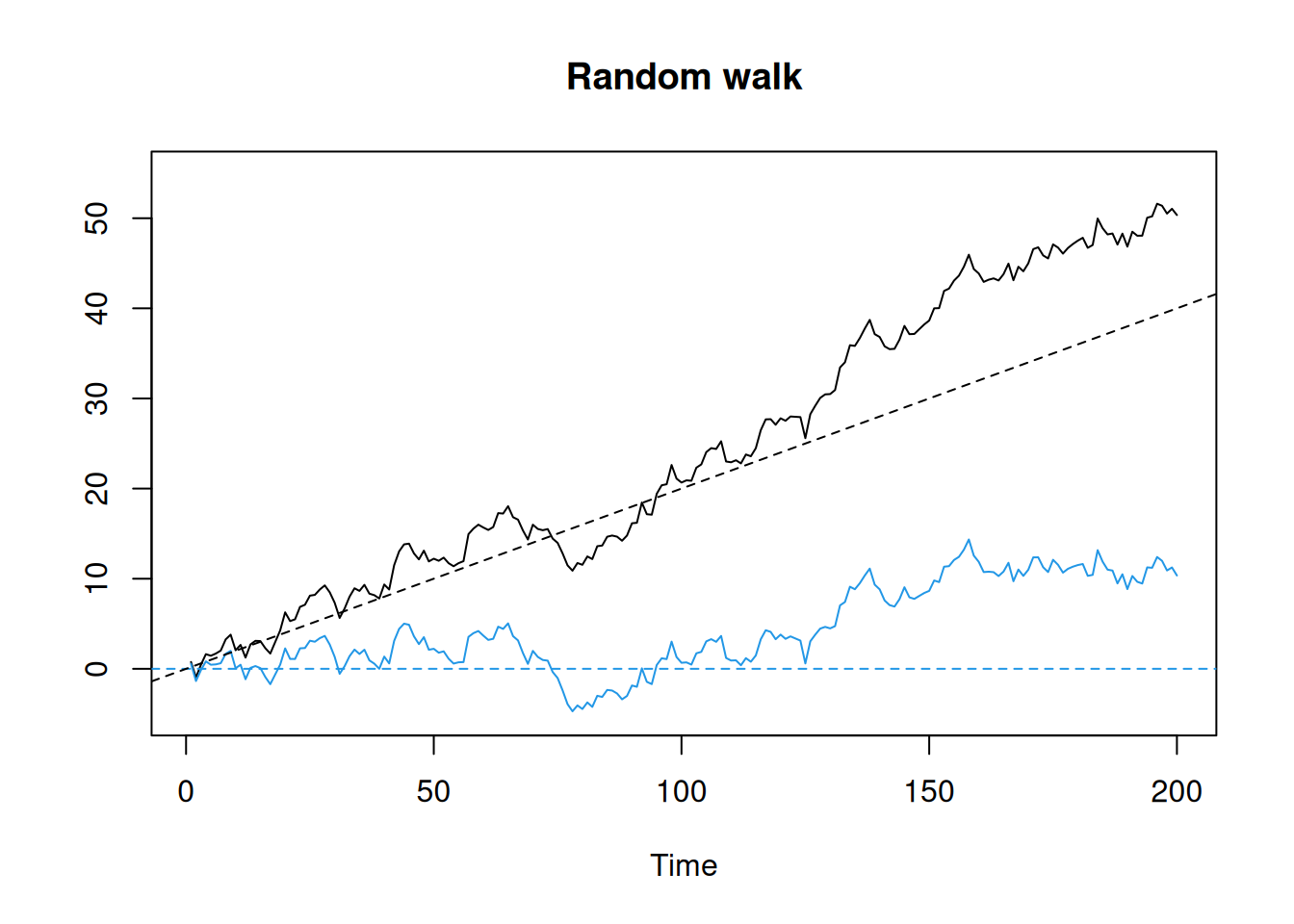
par(mfrow = c(2,2))
plot.ts(x, ylim = c(-5,55), main = "Random walk sin drift", ylab = "", col = 4)
abline(h = 0, col = 4, lty = 2)
acf(x, lag.max = 40)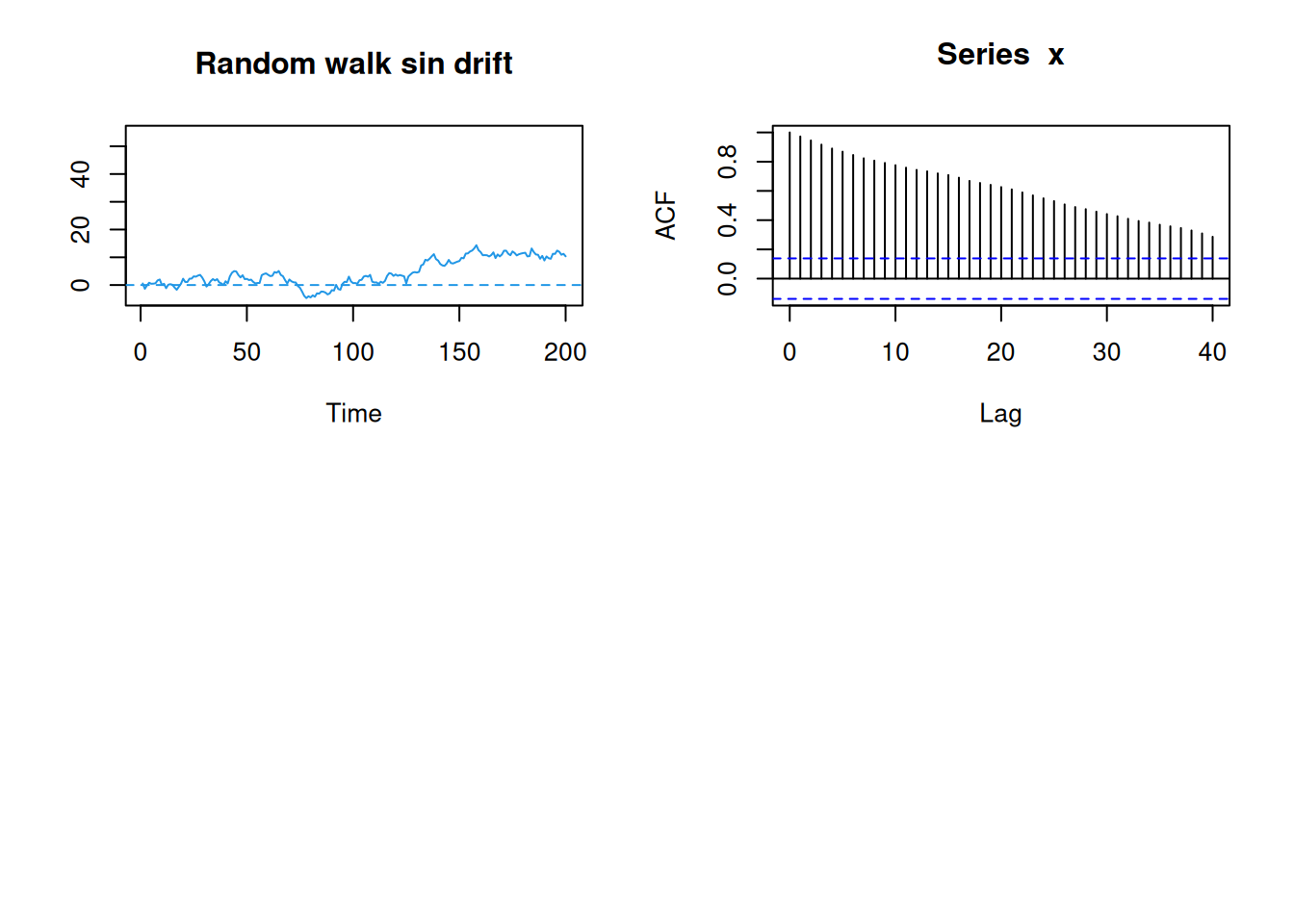
plot.ts(xd, main = "Random walk con drift", ylab = "")
abline(a = 0, b = 0.2, lty = 2)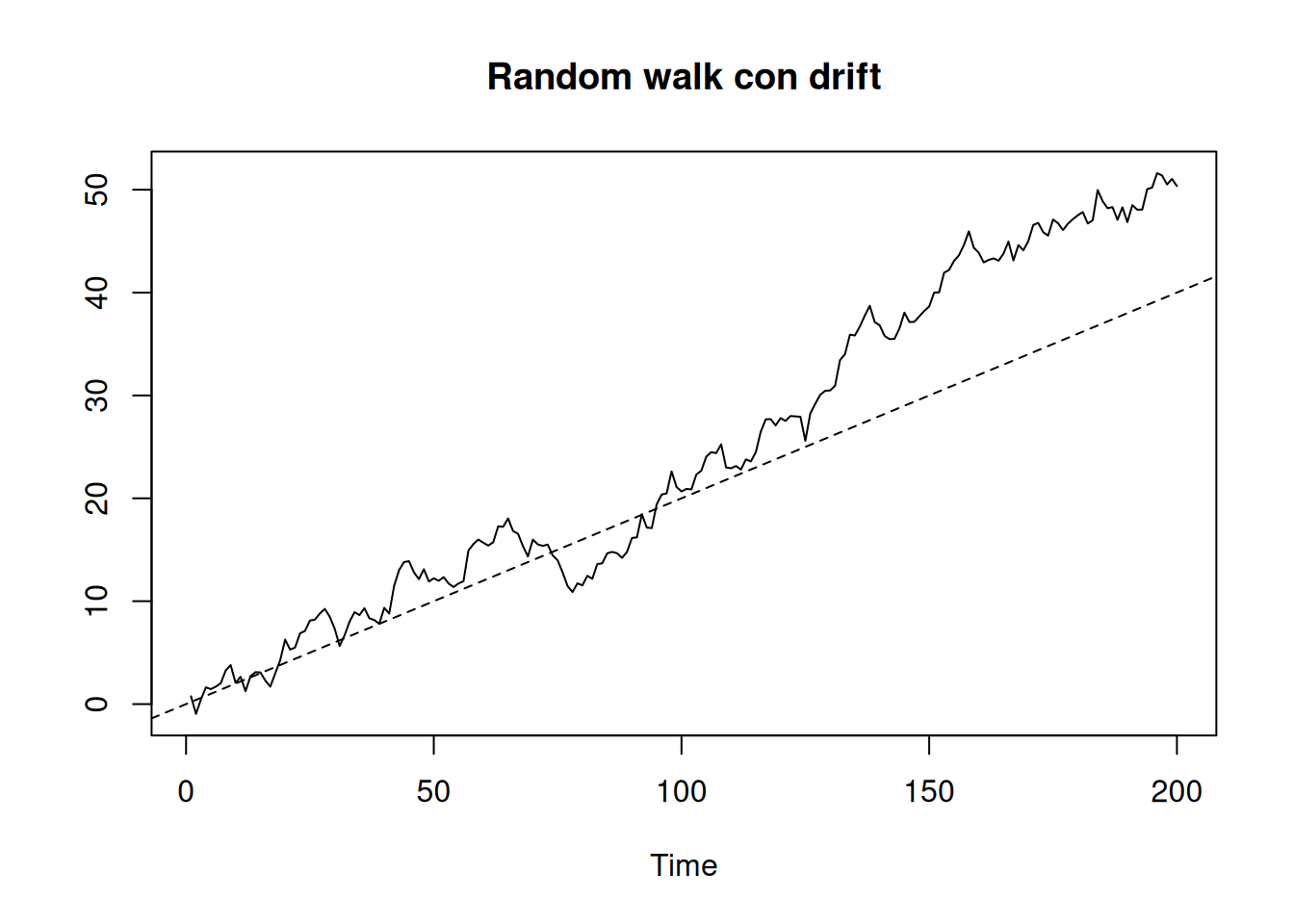
acf(xd, lag.max = 40)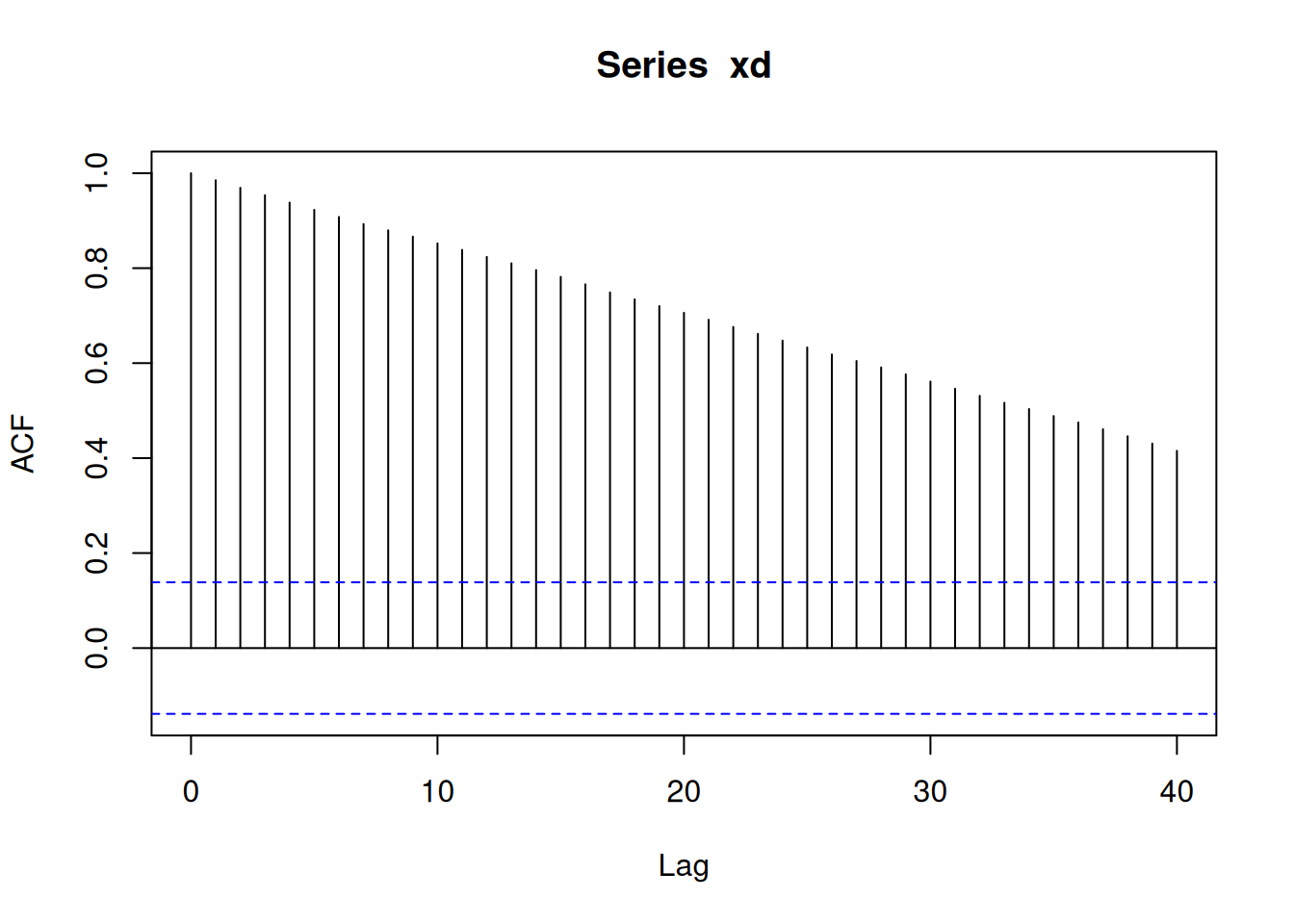
Se logra ver tendencia en el Autocorrelograma
par(mfrow = c(1,2))
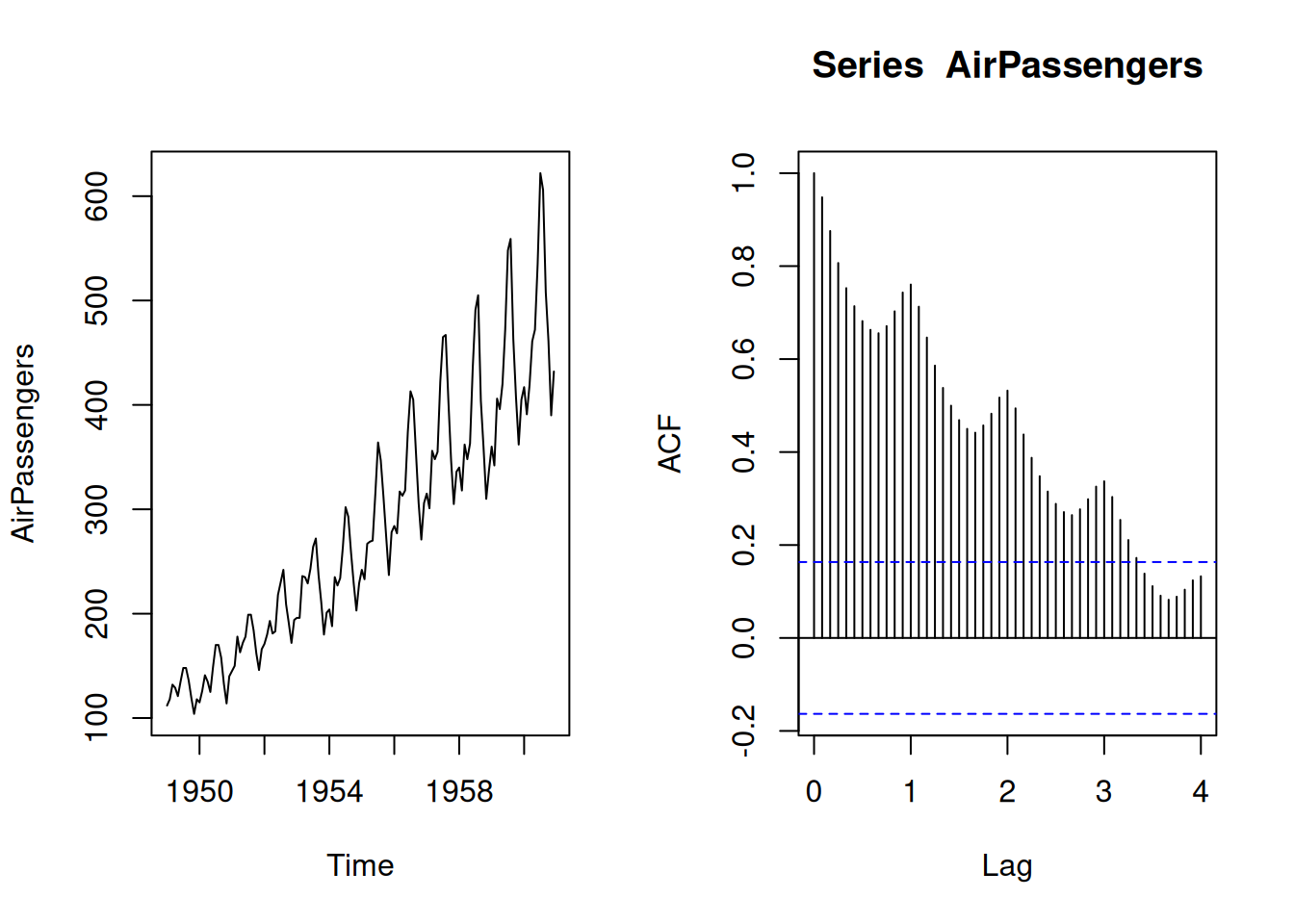
plot(AirPassengers)
acf(AirPassengers, lag.max = 48)